EN
EN
Suchergebnisse für: "motors"
Search In
Elektrische Antriebstechnik
7
Motordrehtische
6
Schrittmotoren mit integrierter Steuerung
5
Motorpositioniertische
4
Linearachsen
3
Servomotoren mit integrierter Steuerung
2
Elektrische Kolbenstangenzylinder
2
COLIBRI 23
2
Colibriservo
2
COLIBRI 17
2
-
![]() MDT23 360110 ohne MotorErfahren Sie mehr
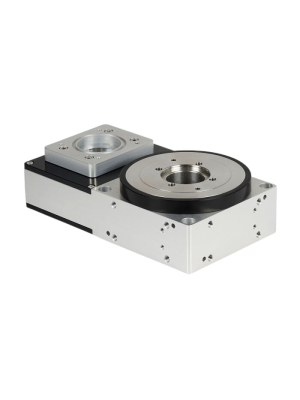
MDT23 360110 ohne MotorErfahren Sie mehrMotordrehtisch MDT23 360110 i20 oder i40
ohne Motor, mit Flansch und Kupplung für Schrittmotor Nema 23
Getriebeübersetzung: 20:1 oder 40:1
Wirkungsgrad η: 0,33
Umkehrspiel: < 0,02° (20:1) / < 0,10° (40:1)
Radialspiel: < 0,02mm
Planlauf der Drehscheibe: < 0,02mm
Benötigtes Eingangsdrehmoment: 0,12 Nm für Leerlauf
zul. Ausgangsdrehmoment M1: 15Nm
zul. Kippmoment M2: 100Nm
max Eingangsdrehzahl: 600 U/min
Gewicht (ohne Motor): 2,7 kg1.522,00 €Exkl. 19% Steuern1.811,18 €Inkl. 19% Steuernzzgl. Versandkosten -
![]() MDT23 360150 ohne MotorErfahren Sie mehr
MDT23 360150 ohne MotorErfahren Sie mehrMotordrehtisch MDT23 360150 i48
ohne Motor
optional mit Flansch und Kupplung für Schrittmotor Nema 23 mit 6.35mm Welle
Getriebeübersetzung: 48:1
Wirkungsgrad η: 0,37
Umkehrspiel: < 0,1°
Radialspiel: < 0,02mm
Planlauf der Drehscheibe: < 0,02mm
Benötigtes Eingangsdrehmoment: 0,15 Nm für Leerlauf
zul. Ausgangsdrehmoment M1: 30Nm
zul. Kippmoment M2: 200Nm
max Eingangsdrehzahl: 600 U/min
Gewicht (ohne Motor): 6.4kg1.990,00 €Exkl. 19% Steuern2.368,10 €Inkl. 19% Steuernzzgl. Versandkosten -
![]() MDT23 QN 360110 ohne MotorErfahren Sie mehr
MDT23 QN 360110 ohne MotorErfahren Sie mehrMDT23 QN 360110 Motordrehtisch ohne Motor
Flansch und Kupplung für Nema 23 Schrittmotor (6.35mm Welle)
Getriebeübersetzung: 2:1
Wirkungsgrad: 0,85
Umkehrspiel: < 0,2°
Planlauf der Drehscheibe:< 0,02 mm
Rundlauf der Drehscheibe: < 0,02mm
Benötigtes Eingangsdrehmoment: 0,12 Nm für Leerlauf
zul. Ausgangsdrehmoment M1: 10 Nm abhängig vom Motor
zul. Kippmoment M2: 100 Nm
max Eingangsdrehzahl: 600 U/min1.895,00 €Exkl. 19% Steuern2.255,05 €Inkl. 19% Steuernzzgl. Versandkosten -
![]() MPT17 2408 24mm Hub MotorpositioniertischErfahren Sie mehr
MPT17 2408 24mm Hub MotorpositioniertischErfahren Sie mehrColibri-L MPT17 2408
Motorpositioniertisch mit Colibri-Kompaktantrieb
Axialspiel: < 0,04mm
Radialspiel der Gleitführungen: < 0,02mm
Spindelsteigung: 2mm
max. Eingangsdrehzahl: 600 U/min
Hub: 24mm902,00 €Exkl. 19% Steuern1.073,38 €Inkl. 19% Steuernzzgl. Versandkosten -
![]()
 Colibri 23 MiniErfahren Sie mehr
Colibri 23 MiniErfahren Sie mehrSchrittmotor mit integrierter Steuerung
Haltemoment: bis 1,75 Nm
Flanschgröße: Nema 23
Steuerung: Basis-Digital I/O oder Takt- /Richtungssignale
Gehäuse: Mini
Anschluß: Sub-D-Stecker 15pol HD434,00 €Exkl. 19% Steuern516,46 €Inkl. 19% Steuernzzgl. Versandkosten -
![]() MPT17 3012 30mm Hub MotorpositioniertischErfahren Sie mehr
MPT17 3012 30mm Hub MotorpositioniertischErfahren Sie mehrColibri-L MPT17 3012
Motorpositioniertisch mit Colibri-Kompaktantrieb
Axialspiel: < 0,04mm
Radialspiel der Gleitführungen: < 0,02mm
Spindelsteigung: 2mm
max. Eingangsdrehzahl: 600 U/min
Hub: 30mm932,00 €Exkl. 19% Steuern1.109,08 €Inkl. 19% Steuernzzgl. Versandkosten -
![]()
 Colibri-LE23Erfahren Sie mehrKolbenstangenzylinder mit Schrittmotor und integrierter SteuerungAlles komplett - Achse - Motor - SteuerungGleitgewinde mit KunststoffmutterMotorgröße: Nema 23Vorschubkräfte: bis 1000 NGeschwindigkeiten: bis 340 mm/sSchnittstellen: Profibus, SPS-I/OHub: 25 - 300 mm909,00 €Exkl. 19% Steuern1.081,71 €Inkl. 19% Steuernzzgl. Versandkosten
Colibri-LE23Erfahren Sie mehrKolbenstangenzylinder mit Schrittmotor und integrierter SteuerungAlles komplett - Achse - Motor - SteuerungGleitgewinde mit KunststoffmutterMotorgröße: Nema 23Vorschubkräfte: bis 1000 NGeschwindigkeiten: bis 340 mm/sSchnittstellen: Profibus, SPS-I/OHub: 25 - 300 mm909,00 €Exkl. 19% Steuern1.081,71 €Inkl. 19% Steuernzzgl. Versandkosten -
![]() MPT17 5008 50mm Hub MotorpositioniertischErfahren Sie mehr
MPT17 5008 50mm Hub MotorpositioniertischErfahren Sie mehrColibri-L MPT17 5008
Motorpositioniertisch mit Colibri-Kompaktantrieb
Axialspiel: < 0,04mm
Radialspiel der Gleitführungen: < 0,02mm
Spindelsteigung: 2mm
max. Eingangsdrehzahl: 600 U/min
Hub: 50mm929,00 €Exkl. 19% Steuern1.105,51 €Inkl. 19% Steuernzzgl. Versandkosten -
![]() MPT17 7512 75mm Hub MotorpositioniertischErfahren Sie mehr
MPT17 7512 75mm Hub MotorpositioniertischErfahren Sie mehrColibri-L MPT17 7512
Motorpositioniertisch mit Colibri-Kompaktantrieb
Axialspiel: < 0,04mm
Radialspiel der Gleitführungen: < 0,02mm
Spindelsteigung: 2mm
max. Eingangsdrehzahl: 600 U/min
Hub: 75mm934,00 €Exkl. 19% Steuern1.111,46 €Inkl. 19% Steuernzzgl. Versandkosten -
![]() Colibri-L FE23L-U U-FührungErfahren Sie mehrElektro Führungseinheit mit Schrittmotor und integrierter SteuerungAlles komplett - Achse - Motor - SteuerungMotorgröße: Nema 23Vorschubkräfte bis 600 NGeschwindigkeiten bis 400 mm/sSchnittstellen: Profinet, SPS-I/OHub: 50 - 300 mm1.067,00 €Exkl. 19% Steuern1.269,73 €Inkl. 19% Steuernzzgl. Versandkosten
Colibri-L FE23L-U U-FührungErfahren Sie mehrElektro Führungseinheit mit Schrittmotor und integrierter SteuerungAlles komplett - Achse - Motor - SteuerungMotorgröße: Nema 23Vorschubkräfte bis 600 NGeschwindigkeiten bis 400 mm/sSchnittstellen: Profinet, SPS-I/OHub: 50 - 300 mm1.067,00 €Exkl. 19% Steuern1.269,73 €Inkl. 19% Steuernzzgl. Versandkosten -
![]()
 ColibriServo BG 5/2, 150WErfahren Sie mehr
ColibriServo BG 5/2, 150WErfahren Sie mehrServomotor mit integrierter Steuerung
Baugröße 5/2
Ansteuerung: Profinet, Profibus DP, CANopen, Ethercat, Digital I/O Positionierbetrieb
Leistung 150 W
Nennmoment: 0,5Nm
Nenndrehzahl: 3000 1/min
Motorversorgung 48 V DC
Steuerungsposition variabel1.417,00 €Exkl. 19% Steuern1.686,23 €Inkl. 19% Steuernzzgl. Versandkosten -
![]() Colibri-LE17Erfahren Sie mehrKolbenstangenzylinder mit Schrittmotor und integrierter SteuerungAlles komplett - Achse - Motor - SteuerungMotorgröße: Nema 17Vorschubkräfte von 45 - 400 NGeschwindigkeiten bis 600 mm/sSchnittstellen: Profibus, CAN-Open, SPS-I/OHubweg 25 - 200 mm866,00 €Exkl. 19% Steuern1.030,54 €Inkl. 19% Steuernzzgl. Versandkosten
Colibri-LE17Erfahren Sie mehrKolbenstangenzylinder mit Schrittmotor und integrierter SteuerungAlles komplett - Achse - Motor - SteuerungMotorgröße: Nema 17Vorschubkräfte von 45 - 400 NGeschwindigkeiten bis 600 mm/sSchnittstellen: Profibus, CAN-Open, SPS-I/OHubweg 25 - 200 mm866,00 €Exkl. 19% Steuern1.030,54 €Inkl. 19% Steuernzzgl. Versandkosten -
![]()
 ColibriServo BG 6, 120W-260WErfahren Sie mehr
ColibriServo BG 6, 120W-260WErfahren Sie mehrServomotor mit integrierter Steuerung
Baugröße 6/x
Ansteuerung: Profinet, Profibus DP, CANopen, Ethercat, Digital I/O Positionierbetrieb
Leistung 120W - 260W
Nenndrehzahl: 3000 1/min
Motorversorgung 24 –48 V DC880,00 €Exkl. 19% Steuern1.047,20 €Inkl. 19% Steuernzzgl. Versandkosten -
![]() MDT17 36008 MotordrehtischErfahren Sie mehr
MDT17 36008 MotordrehtischErfahren Sie mehrColibri-MDT 17 36008 Motordrehtisch
Getriebeübersetzung: 40:1
Umkehrspiel: < 0,12°
Radialspiel: < 0,02mm
Planlauf der Drehscheibe: < 0,03mm
zul. Ausgangsdrehmoment M1: 1,2Nm
zul. Kippmoment M2: 1,8N
max Eingangsdrehzahl: 600 U/min1.421,41 €Exkl. 19% Steuern1.691,48 €Inkl. 19% Steuernzzgl. Versandkosten -
![]() Colibri 34 BACErfahren Sie mehr
Colibri 34 BACErfahren Sie mehrSchrittmotor mit integrierter Steuerung
Haltemoment: 3,3 Nm / 7Nm
Flanschgröße: Nema 34
Steuerung: Basis Digital I/O oder Takt- /Richtungssignale
Gehäuse: BAC
Anschluß: 16 Pol M23851,04 €Exkl. 19% Steuern1.012,74 €Inkl. 19% Steuernzzgl. Versandkosten -
![]() MDT17 36012 MotordrehtischErfahren Sie mehr
MDT17 36012 MotordrehtischErfahren Sie mehrColibri-MDT 17 36012 Motordrehtisch
Getriebeübersetzung: 55:1Umkehrspiel: < 0,1°Radialspiel: < 0,02mmPlanlauf der Drehscheibe: < 0,03mmzul. Ausgangsdrehmoment M1: 3Nm
zul. Kippmoment M2: 3Nmmax Eingangsdrehzahl: 600 U/min1.440,32 €Exkl. 19% Steuern1.713,98 €Inkl. 19% Steuernzzgl. Versandkosten -
![]() Colibri 17Erfahren Sie mehr
Colibri 17Erfahren Sie mehrSchrittmotor mit integrierter Steuerung
Haltemoment: 0,43 Nm
Flanschgröße: Nema 17
Schnittstellen: Profibus, CANopen oder Digital I/O
Anschluß:
1x Sub-D-Stecker 15pol HD Powersupply + I/O
1x Sub-D 9-Pol Konfigurationsschnittstelle410,00 €Exkl. 19% Steuern487,90 €Inkl. 19% Steuernzzgl. Versandkosten -
![]() MDT17 36012-HPErfahren Sie mehr
MDT17 36012-HPErfahren Sie mehrColibri-L MDT17 36012-HP i=10 o. i=45
inkl. Motor und Positioniersteuerung BAC
Getriebeübersetzung: 10:1 o.45:1
Wirkungsgrad η: 0,69
Umkehrspiel: < 0,2°
Radialspiel: < 0,02mm
Planlauf der Drehscheibe: < 0,03mm
zul. Ausgangsdrehmoment M1: 3Nm
zul. Kippmoment M2: 3Nm
max Eingangsdrehzahl: 600 U/min1.722,00 €Exkl. 19% Steuern2.049,18 €Inkl. 19% Steuernzzgl. Versandkosten -
![]()
 Colibri 23Erfahren Sie mehr
Colibri 23Erfahren Sie mehrSchrittmotor mit integrierter Steuerung
Haltemoment: 0,6 bis 1,75 Nm
Flanschgröße: Nema 23
Schnittstellen: Profibus, Digital I/O
477,68 €Exkl. 19% Steuern568,44 €Inkl. 19% Steuernzzgl. Versandkosten