EN
EN  IT
IT SCHRITTMOTOREN
NEMA Schrittmotoren von NEMA 11 bis NEMA 34
Unsere Schrittmotoren eignen sich für präzise Positionieraufgaben im Maschinenbau sowie in der industriellen Automation. Erhältlich sind bei uns Schrittmotoren in den Baugrößen NEMA 11, NEMA 17, NEMA 23, NEMA 24 und NEMA 34. Wir liefern Step Motoren als Einzelmotor oder passend für Ihre individuelle Antriebslösung. Neben Standard-Schrittmotoren fertigen wir auch kundenspezifische Sonderlösungen mit angepassten Ausstattungsvarianten und speziellen mechanischen Anpassungen.
Für die Auswahl des passenden Schrittmotors ist nicht allein das Haltemoment entscheidend, sondern insbesondere der Drehmomentverlauf über die Drehzahl. Gerne unterstützen wir Sie bei der Auswahl des optimalen Schrittmotors für Ihre Anwendung und bieten auf Wunsch auch passende Schrittmotorsteuerungen oder integrierte Komplettlösungen an.

NEMA 11 Schrittmotoren
- Drehmoment bis ca. 0,2 Nm
- Flanschgröße 28 × 28 mm
- Kompakte Schrittmotoren für präzise Positionieraufgaben bei geringem Bauraum
NEMA 17 Schrittmotoren
- Drehmoment bis ca. 0,6 Nm
- Flanschgröße 42 × 42 mm
- Vielseitige Schrittmotoren mit ausgewogenem Verhältnis von Baugröße und Leistung
NEMA 23 Schrittmotoren
- Drehmoment bis ca. 2 Nm
- Flanschgröße 57 × 57 mm
- Leistungsstarke Schrittmotoren für Maschinenbau und anspruchsvollere Anwendungen
NEMA 24 Schrittmotoren
- Drehmoment bis ca. 3 Nm
- Flanschgröße 60× 60 mm
- Schrittmotoren mit erhöhtem Drehmoment für Anwendungen mit höherem Leistungsbedarf
NEMA 34 Schrittmotoren
- Drehmoment bis ca. 12 Nm
- Flanschgröße 86 × 86 mm
- Starke-Schrittmotoren für große Achsen und maximale Belastungen
Schrittmotoren direkt im Shop kaufen
Entdecken Sie ausgewählte NEMA Schrittmotoren für industrielle Positionier- und Bewegungsaufgaben. Bei uns erhalten Sie kompakte Einzelmotoren oder leistungsstarke Schrittmotoren.
Im Shop finden Sie eine Auswahl häufig eingesetzter Standardmotoren. Darüber hinaus unterstützen wir Sie gerne bei der Auswahl kundenspezifischer Schrittmotoren, Sonderausführungen oder passender Antriebslösungen für Ihre Anwendung.
Schrittmotoren als intelligente Komplettlösung
Wenn Sie mehr als nur einen Motor benötigen, bieten wir auch passende Schrittmotorsteuerungen und integrierte Antriebslösungen für industrielle Anwendungen an.
Neben einzelnen Schrittmotoren realisieren wir komplette Lösungen für den Maschinenbau und die industrielle Automation. Dabei werden Motor, Elektronik und Steuerung optimal aufeinander abgestimmt. Wir liefern klassische Schaltschranklösungen, aber auch kompakte Antriebssysteme mit integrierter Elektronik.
Unsere integrierten Schrittmotoren reduzieren Verdrahtungsaufwand, sparen Platz im Schaltschrank und ermöglichen leistungsfähige sowie flexible Bewegungsabläufe für moderne Maschinenkonzepte.
Präzise Schrittmotoren für dynamische Positionieraufgaben
Unsere Schrittmotoren ermöglichen hochpräzise und wiederholgenaue Bewegungen in der Automatisierungstechnik, im Maschinenbau sowie in modernen Positioniersystemen. Durch definierte Schrittwinkel, typischerweise 1,8° mit 200 Schritten pro Umdrehung, eignen sich Schrittmotoren ideal für exakte Positionieraufgaben und dynamische Achsbewegungen.
Für die optimale Auslegung eines Schrittmotors sind neben dem Haltemoment insbesondere das Rotorträgheitsmoment sowie die elektrischen Parameter wie Phasenstrom, Wicklungswiderstand und Induktivität entscheidend. Außerdem ist die Drehmoment-Drehzahl-Kennlinie besonders wichtig bei der Bewertung des Betriebsverhaltens und der Auswahl des passenden Antriebssystems.

Der passende Schrittmotor für Ihre Anwendung
Wir liefern Einzelschrittmotor, integrierte Schrittmotoren oder kundenspezifische Sonderausführung, wir unterstützen Sie bei der Auswahl des passenden Schrittmotors für Ihre Anforderung.
Gemeinsam finden wir die optimale Kombination aus Schrittmotor, Steuerung und Mechanik für präzise Bewegungs- und Positionieraufgaben im Maschinenbau sowie in der industriellen Automation.
Gerne beraten wir Sie persönlich zu Baugröße, Drehmoment, Integration und individuellen Anpassungsmöglichkeiten.
Typische Einsatzbereiche für Schrittmotoren
Schrittmotoren werden in zahlreichen Branchen eingesetzt, in denen präzise, wiederholgenaue und dynamische Bewegungen erforderlich sind.
Verpackungsindustrie
Schrittmotoren werden in Verpackungsanlagen häufig in Verbindung mit elektrischen Hub- und Positioniersystemen eingesetzt – beispielsweise für Formatverstellungen, Pick-&-Place-Systeme oder lineare Bewegungsaufgaben.
Automobilindustrie
In Montage- und Prüfanlagen sorgen Schrittmotoren mit integrierter Steuerung für präzise Positionieraufgaben, reduzierte Verdrahtung und kompakte Antriebslösungen innerhalb automatisierter Fertigungsprozesse.
Zu den integrierten SchrittmotorenCNC & Bearbeitungstechnik
Für CNC-Anwendungen und Bearbeitungssysteme ermöglichen Schrittmotoren präzise Achsbewegungen, exakte Positionierungen und eine hohe Wiederholgenauigkeit.
Zu den SchrittmotorenLogistik & Fördertechnik
In der Logistik und Fördertechnik kommen Schrittmotoren häufig als präzise Antriebe für Zahnriemenachsen und lineare Fördersysteme zum Einsatz.
Zu den ZahnriemenachsenMedizintechnik & Laborautomation
Für Laborautomation und medizinische Systeme werden Schrittmotoren oft mit präzisen Spindelachsen kombiniert, um exakte und wiederholgenaue Bewegungen zu realisieren.
Zu den SpindelachsenMaschinen- & Anlagenbau
Im Maschinen- und Anlagenbau werden Schrittmotoren häufig als Antrieb für modulare Achssysteme und Positionierlösungen eingesetzt.
Zu den AchssystemenSchrittmotoren richtig auslegen mit dem MotorFinder
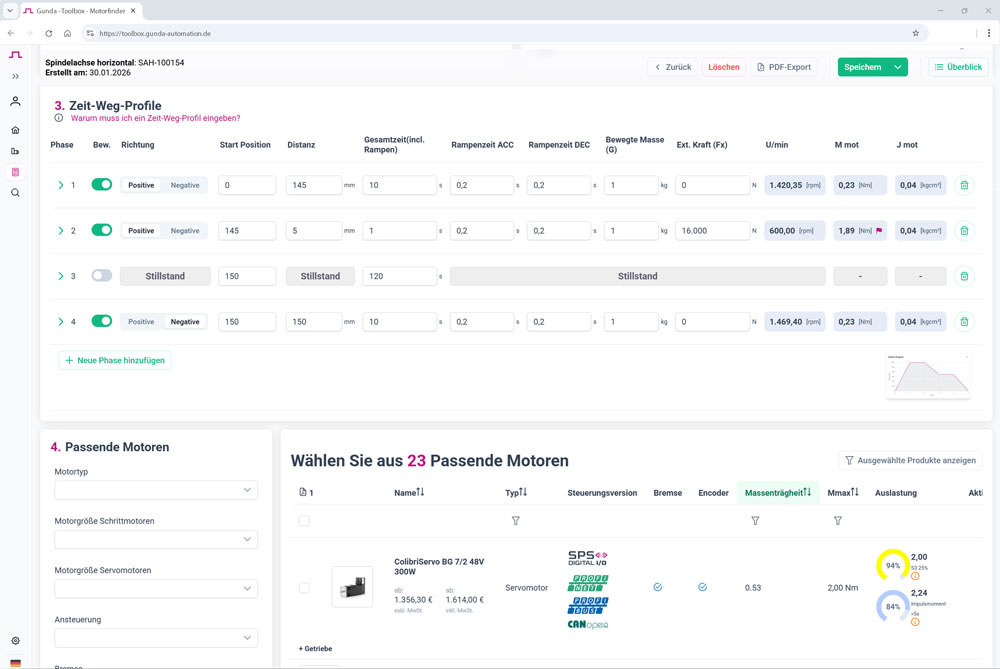
Der MotorFinder von Gunda Automation unterstützt Sie bei der technischen Auslegung von Schrittmotoren, Achssystemen und kompletten Antriebslösungen. Auf Basis realer Bewegungsdaten, Massen und Kräfte lassen sich passende Motoren schnell und nachvollziehbar dimensionieren.
In mehreren Schritten werden Achssystem, Bewegungsprofil und Lastdaten definiert. Anschließend berechnet das Tool geeignete Schrittmotoren inklusive Auslastung und visualisiert die Ergebnisse direkt in der Drehmoment-Drehzahl-Kennlinie.
Zusätzlich ermöglicht der MotorFinder die Bewertung von Beschleunigung, Drehzahl und Bewegungsprofilen sowie die Auswahl passender Antriebslösungen – optional auch mit Getriebe.
Durch Zeit-Weg-Diagramme, Projektverwaltung und PDF-Export eignet sich der MotorFinder ideal für die technische Projektierung im Maschinenbau und in der industriellen Automation.
Jetzt online starten
Öffnen Sie den MotorFinder in der Toolbox und erstellen Sie in wenigen Minuten eine belastbare Auslegung – inklusive Visualisierung, Auslastung und Export.
Zum MotorFinderHäufig gestellte Fragen zu Schrittmotoren
Weil Schrittmotoren häufig für präzise Positionieraufgaben im Maschinenbau und in der industriellen Automation eingesetzt werden, sind Fragen zu Haltemoment, Schrittwinkel, Drehmoment-Drehzahl-Kennlinie und der richtigen Auslegung besonders wichtig.
In diesem FAQ beantworten wir die wichtigsten technischen Fragen rund um NEMA Schrittmotoren, typische Einsatzbereiche sowie relevante Leistungsparameter für die Auswahl des passenden Motors.
Was sind Schrittmotoren?
Schrittmotoren sind Elektromotoren, die ihre Bewegung in definierte Winkelbewegungen aufteilen. Jeder Steuerimpuls erzeugt einen festen Schritt, wodurch Positionen reproduzierbar angefahren werden können. Deshalb werden Schrittmotoren häufig für präzise Positionieraufgaben in Automatisierungssystemen, Maschinenbau und Dosieranwendungen eingesetzt.
Welche Bedeutung hat der Schrittwinkel bei einem Schrittmotor?
Der Schrittwinkel beschreibt die mechanische Drehbewegung eines Schrittmotors pro Steuerimpuls. Ein typischer Wert ist 1,8°, was einer Grundauflösung von 200 Schritte pro Umdrehung entspricht. Über Mikroschrittansteuerung kann diese Auflösung weiter erhöht werden, wodurch sich Laufruhe und Bewegungsauflösung verbessern.
Was ist das Haltemoment eines Schrittmotors?
Das Haltemoment (Nm) beschreibt das maximale Drehmoment, das ein bestromter Schrittmotor im Stillstand gegen eine Last halten kann. Dieser Wert wird üblicherweise bei Nenn- oder Maximalstrom angegeben und ist ein wichtiger Parameter für die richtige Motorauswahl.
Warum ist die Drehmoment-Drehzahl-Kennlinie wichtig?
Die Drehmoment-Drehzahl-Kennlinie zeigt, wie sich das verfügbare Drehmoment eines Schrittmotors mit steigender Drehzahl verändert. Da das Drehmoment bei höheren Drehzahlen abnimmt, ist diese Kennlinie entscheidend für die korrekte Auslegung und verhindert Schrittverluste im Betrieb.
Was bedeutet Mikroschritt bei Schrittmotoren?
Beim Mikroschrittbetrieb wird ein Vollschritt elektronisch in mehrere kleinere Schritte unterteilt. Dadurch verbessert sich die Laufruhe des Schrittmotors und die Bewegungsauflösung kann erhöht werden.
Was ist der Unterschied zwischen Schrittmotor und Servomotor?
Ein Schrittmotor bewegt sich in definierten Schritten und eignet sich besonders für präzise Positionieraufgaben bei moderaten Drehzahlen. Ein Servomotor arbeitet dagegen mit geschlossener Regelung und wird häufig bei sehr dynamischen Anwendungen oder hohen Drehzahlen eingesetzt.
Wann verliert ein Schrittmotor Schritte?
Ein Schrittmotor verliert Schritte, wenn das benötigte Lastmoment größer ist als das verfügbare Motordrehmoment. Ursachen können zu hohe Beschleunigungen, mechanische Überlastung oder eine falsche Motorauslegung sein.
Welche elektrischen Werte sind bei Schrittmotoren wichtig?
Zu den wichtigsten elektrischen Parametern gehören Phasenstrom (A), Wicklungswiderstand (Ω) und Induktivität (mH). Diese Werte beeinflussen Dynamik, Drehmomentverhalten und Wärmeentwicklung des Motors.
Was bedeutet NEMA bei Schrittmotoren?
NEMA steht für die National Electrical Manufacturers Association und bezeichnet eine standardisierte Baugröße für Elektromotoren. Bei Schrittmotoren beschreibt die NEMA-Bezeichnung hauptsächlich die Flanschgröße des Motors.
Ein NEMA 17 Schrittmotor besitzt beispielsweise eine Flanschgröße von ca. 42 × 42 mm, während ein NEMA 23 Schrittmotor etwa 57 × 57 mm groß ist. Die NEMA-Größe liefert damit wichtige Hinweise auf Bauform, Einbaumaße und typischen Drehmomentbereich des Motors.
Welche Baugrößen gibt es bei Schrittmotoren?
Typische Baugrößen sind NEMA 11, NEMA 17, NEMA 23, NEMA 24 und NEMA 34. Die NEMA-Bezeichnung beschreibt die Flanschgröße des Motors und gibt Hinweise auf Baugröße und Drehmomentbereich.
Wie wird ein Schrittmotor richtig dimensioniert?
Für die richtige Dimensionierung eines Schrittmotors müssen Lastmoment, Drehzahl, Beschleunigung und die Drehmoment-Drehzahl-Kennlinie berücksichtigt werden. Eine korrekte Auslegung sorgt für ausreichende Drehmomentreserven und einen zuverlässigen Betrieb.
Wann sollte man einen Schrittmotor statt eines Servomotors einsetzen?
Ein Schrittmotor eignet sich besonders für präzise Positionieraufgaben mit moderaten Drehzahlen und wenn eine wirtschaftliche sowie einfach integrierbare Antriebslösung gefragt ist.
Wo werden Schrittmotoren eingesetzt?
Schrittmotoren werden häufig in Automatisierungssystemen, Verpackungsmaschinen, CNC-Anwendungen, Dosiersystemen, Laborautomation sowie im Maschinen- und Anlagenbau eingesetzt.
Können Schrittmotoren kundenspezifisch angepasst werden?
Ja, viele Schrittmotoren können kundenspezifisch angepasst werden. Möglich sind beispielsweise spezielle Wellengeometrien, Steckverbinder, Kabelausführungen, Encoder, Bremsen oder angepasste mechanische Schnittstellen für OEM- und Sonderanwendungen.

-
![]()
Schrittmotor Nema11 mit Litzenanschluss
Erfahren Sie mehr
Haltemoment: 0,06 NmPreis anzeigen53,00 €Exkl. 19% Steuern63,07 €Inkl. 19% Steuernzzgl. Versandkosten -
![]()
Schrittmotor Nema 17 mit Litzenanschluss
Erfahren Sie mehr
Haltemoment: 0,3- 0,53 NmPreis anzeigen33,00 €Exkl. 19% Steuern39,27 €Inkl. 19% Steuernzzgl. Versandkosten -
![]()
Schrittmotor Nema 23 mit Litzenanschluss hinten
Erfahren Sie mehr
Haltemoment: 0,6 - 2 NmPreis anzeigen45,00 €Exkl. 19% Steuern53,55 €Inkl. 19% Steuernzzgl. Versandkosten -
![]()
Schrittmotor Nema 23 mit integrierter Bremse
Erfahren Sie mehr
Litzenanschluss hinten
Haltemoment: 0,6 - 2 NmPreis anzeigen125,00 €Exkl. 19% Steuern148,75 €Inkl. 19% Steuernzzgl. Versandkosten