EN
EN
Suchergebnisse für: "colibri l"
Search In
Zubehör
11
Kabel
11
Elektrische Antriebstechnik
9
Schrittmotoren mit integrierter Steuerung
8
Motorpositioniertische
4
Servomotoren mit integrierter Steuerung
4
Motordrehtische
4
Elektrische Kolbenstangenzylinder
4
Colibriservo
4
Linearachsen
3
- Verwandte Suchbegriffe
- colibri
- Colibri C
- Colibri Handbuch
- colibri e
- colibri l bac
-
![]() Colibri-L SSC23Erfahren Sie mehrElektro Kompaktzylinder mit Schrittmotor und integrierter SteuerungAlles komplett - Achse - Motor - SteuerungMotorgröße: Nema 23Vorschubkräfte von 200 - 1800 NGeschwindigkeiten bis 250 mm/sUmfangreiches ISO-ZubehörSchnittstellen: Profinet, Profibus, CAN-Open, SPS-I/OHubweg bis 30 - 55 mm1.240,59 €Exkl. 19% Steuern1.476,30 €Inkl. 19% Steuernzzgl. Versandkosten
Colibri-L SSC23Erfahren Sie mehrElektro Kompaktzylinder mit Schrittmotor und integrierter SteuerungAlles komplett - Achse - Motor - SteuerungMotorgröße: Nema 23Vorschubkräfte von 200 - 1800 NGeschwindigkeiten bis 250 mm/sUmfangreiches ISO-ZubehörSchnittstellen: Profinet, Profibus, CAN-Open, SPS-I/OHubweg bis 30 - 55 mm1.240,59 €Exkl. 19% Steuern1.476,30 €Inkl. 19% Steuernzzgl. Versandkosten -
![]() Colibri-L FE23L-U U-FührungErfahren Sie mehrElektro Führungseinheit mit Schrittmotor und integrierter SteuerungAlles komplett - Achse - Motor - SteuerungMotorgröße: Nema 23Vorschubkräfte bis 600 NGeschwindigkeiten bis 400 mm/sSchnittstellen: Profinet, SPS-I/OHub: 50 - 300 mm1.067,00 €Exkl. 19% Steuern1.269,73 €Inkl. 19% Steuernzzgl. Versandkosten
Colibri-L FE23L-U U-FührungErfahren Sie mehrElektro Führungseinheit mit Schrittmotor und integrierter SteuerungAlles komplett - Achse - Motor - SteuerungMotorgröße: Nema 23Vorschubkräfte bis 600 NGeschwindigkeiten bis 400 mm/sSchnittstellen: Profinet, SPS-I/OHub: 50 - 300 mm1.067,00 €Exkl. 19% Steuern1.269,73 €Inkl. 19% Steuernzzgl. Versandkosten -
![]() Colibri 23 4.0 SignalkabelErfahren Sie mehr
Colibri 23 4.0 SignalkabelErfahren Sie mehr• 3-20 m • 12-polig • gerade Buchse • A-kodiert • schleppkettentauglich
63,00 €Exkl. 19% Steuern74,97 €Inkl. 19% Steuernzzgl. Versandkosten -
![]()
 Colibri-LE23Erfahren Sie mehrKolbenstangenzylinder mit Schrittmotor und integrierter SteuerungAlles komplett - Achse - Motor - SteuerungGleitgewinde mit KunststoffmutterMotorgröße: Nema 23Vorschubkräfte: bis 1000 NGeschwindigkeiten: bis 340 mm/sSchnittstellen: Profibus, SPS-I/OHub: 25 - 300 mm909,00 €Exkl. 19% Steuern1.081,71 €Inkl. 19% Steuernzzgl. Versandkosten
Colibri-LE23Erfahren Sie mehrKolbenstangenzylinder mit Schrittmotor und integrierter SteuerungAlles komplett - Achse - Motor - SteuerungGleitgewinde mit KunststoffmutterMotorgröße: Nema 23Vorschubkräfte: bis 1000 NGeschwindigkeiten: bis 340 mm/sSchnittstellen: Profibus, SPS-I/OHub: 25 - 300 mm909,00 €Exkl. 19% Steuern1.081,71 €Inkl. 19% Steuernzzgl. Versandkosten -
![]()
 Colibri 34 4.0 Profinet o. CANopenErfahren Sie mehr
Colibri 34 4.0 Profinet o. CANopenErfahren Sie mehrSchrittmotor mit integrierter Steuerung
Haltemoment: bis 12 Nm
Flanschgröße: Nema 34
Steuerung: Profinet o. CANopen
Stecker: M12790,00 €Exkl. 19% Steuern940,10 €Inkl. 19% Steuernzzgl. Versandkosten -
![]() Colibri34 4.0 Powerkabel L-KodiertErfahren Sie mehr• 2-20 m
Colibri34 4.0 Powerkabel L-KodiertErfahren Sie mehr• 2-20 m
• L-kodiert
• Buchse gerade• 5-polig auf freies Leitungsende• 0,75mm²
• schleppkettentauglich66,80 €Exkl. 19% Steuern79,49 €Inkl. 19% Steuernzzgl. Versandkosten -
![]() Colibri-LE23 mit Colibri 4.0 -Erfahren Sie mehrKolbenstangenzylinder mit Schrittmotor und integrierter SteuerungAlles komplett - Achse - Motor - SteuerungMotorgröße: Nema 23Vorschubkräfte: bis 1000 NGeschwindigkeiten: bis 600 mm/sSchnittstellen: Profinet, CAN-OpenHub: 25 - 300 mm1.063,00 €Exkl. 19% Steuern1.264,97 €Inkl. 19% Steuernzzgl. Versandkosten
Colibri-LE23 mit Colibri 4.0 -Erfahren Sie mehrKolbenstangenzylinder mit Schrittmotor und integrierter SteuerungAlles komplett - Achse - Motor - SteuerungMotorgröße: Nema 23Vorschubkräfte: bis 1000 NGeschwindigkeiten: bis 600 mm/sSchnittstellen: Profinet, CAN-OpenHub: 25 - 300 mm1.063,00 €Exkl. 19% Steuern1.264,97 €Inkl. 19% Steuernzzgl. Versandkosten -
![]() Colibri 23 MiniErfahren Sie mehr
Colibri 23 MiniErfahren Sie mehrSchrittmotor mit integrierter Steuerung
Haltemoment: bis 1,75 Nm
Flanschgröße: Nema 23
Steuerung: Basis-Digital I/O oder Takt- /Richtungssignale
Gehäuse: Mini
Anschluß: Sub-D-Stecker 15pol HD434,00 €Exkl. 19% Steuern516,46 €Inkl. 19% Steuernzzgl. Versandkosten -
![]() Colibri-LE17Erfahren Sie mehrKolbenstangenzylinder mit Schrittmotor und integrierter SteuerungAlles komplett - Achse - Motor - SteuerungMotorgröße: Nema 17Vorschubkräfte von 45 - 400 NGeschwindigkeiten bis 600 mm/sSchnittstellen: Profibus, CAN-Open, SPS-I/OHubweg 25 - 200 mm866,00 €Exkl. 19% Steuern1.030,54 €Inkl. 19% Steuernzzgl. Versandkosten
Colibri-LE17Erfahren Sie mehrKolbenstangenzylinder mit Schrittmotor und integrierter SteuerungAlles komplett - Achse - Motor - SteuerungMotorgröße: Nema 17Vorschubkräfte von 45 - 400 NGeschwindigkeiten bis 600 mm/sSchnittstellen: Profibus, CAN-Open, SPS-I/OHubweg 25 - 200 mm866,00 €Exkl. 19% Steuern1.030,54 €Inkl. 19% Steuernzzgl. Versandkosten -
![]() Colibri 34 BACErfahren Sie mehr
Colibri 34 BACErfahren Sie mehrSchrittmotor mit integrierter Steuerung
Haltemoment: 3,3 Nm / 7Nm
Flanschgröße: Nema 34
Steuerung: Basis Digital I/O oder Takt- /Richtungssignale
Gehäuse: BAC
Anschluß: 16 Pol M23851,04 €Exkl. 19% Steuern1.012,74 €Inkl. 19% Steuernzzgl. Versandkosten -
![]() Colibri Umsetzer USB-TTLErfahren Sie mehr
Colibri Umsetzer USB-TTLErfahren Sie mehrColibri Schnittstellenumsetzer USB<->TTL
160,60 €Exkl. 19% Steuern191,11 €Inkl. 19% Steuernzzgl. Versandkosten -
![]() Colibri 17Erfahren Sie mehr
Colibri 17Erfahren Sie mehrSchrittmotor mit integrierter Steuerung
Haltemoment: 0,43 Nm
Flanschgröße: Nema 17
Schnittstellen: Profibus, CANopen oder Digital I/O
Anschluß:
1x Sub-D-Stecker 15pol HD Powersupply + I/O
1x Sub-D 9-Pol Konfigurationsschnittstelle410,00 €Exkl. 19% Steuern487,90 €Inkl. 19% Steuernzzgl. Versandkosten -
![]() Colibri Y-Adapter für Mini-GeräteErfahren Sie mehr
Colibri Y-Adapter für Mini-GeräteErfahren Sie mehrColibri Schnittstellenadapter für Mini-Geräte
49,00 €Exkl. 19% Steuern58,31 €Inkl. 19% Steuernzzgl. Versandkosten -
![]()
 Colibri 23Erfahren Sie mehr
Colibri 23Erfahren Sie mehrSchrittmotor mit integrierter Steuerung
Haltemoment: 0,6 bis 1,75 Nm
Flanschgröße: Nema 23
Schnittstellen: Profibus, Digital I/O
477,68 €Exkl. 19% Steuern568,44 €Inkl. 19% Steuernzzgl. Versandkosten -
![]() Colibri Umsetzer USB-TTL MiniDINErfahren Sie mehr
Colibri Umsetzer USB-TTL MiniDINErfahren Sie mehrColibri Schnittstellenumsetzer USB<->TTL MiniDin
160,60 €Exkl. 19% Steuern191,11 €Inkl. 19% Steuernzzgl. Versandkosten -
![]()
 Colibri 24 4.0 Profinet o.CANopenErfahren Sie mehr
Colibri 24 4.0 Profinet o.CANopenErfahren Sie mehrSchrittmotor mit integrierter Steuerung
Haltemoment: bis 3 Nm
Flanschgröße: Nema 24
Steuerung: Profinet oder CANopen
Stecker: M12648,00 €Exkl. 19% Steuern771,12 €Inkl. 19% Steuernzzgl. Versandkosten -
![]() Colibri-LE63HD ISO 15552Erfahren Sie mehrKolbenstangenzylinder mit Servomotor und integriertem ReglerAlles komplett - Achse - Motor - ReglerVorschubkräfte von 1000 - 6800 NGeschwindigkeiten bis 400 mm/sUmfangreiches ISO-ZubehörSchnittstellen: Profinet, Ethercat, Profibus, CAN-Open, SPS-I/OHubweg 100 - 1500 mm3.139,00 €Exkl. 19% Steuern3.735,41 €Inkl. 19% Steuernzzgl. Versandkosten
Colibri-LE63HD ISO 15552Erfahren Sie mehrKolbenstangenzylinder mit Servomotor und integriertem ReglerAlles komplett - Achse - Motor - ReglerVorschubkräfte von 1000 - 6800 NGeschwindigkeiten bis 400 mm/sUmfangreiches ISO-ZubehörSchnittstellen: Profinet, Ethercat, Profibus, CAN-Open, SPS-I/OHubweg 100 - 1500 mm3.139,00 €Exkl. 19% Steuern3.735,41 €Inkl. 19% Steuernzzgl. Versandkosten -
![]()
 Colibri 23 4.0 Profinet o. CANopenErfahren Sie mehr
Colibri 23 4.0 Profinet o. CANopenErfahren Sie mehrSchrittmotor mit integrierter Steuerung
Haltemoment: bis 2 Nm
Flanschgröße: Nema 23
Steuerung: Profinet oder CANOpen
Stecker: M12588,00 €Exkl. 19% Steuern699,72 €Inkl. 19% Steuernzzgl. Versandkosten -
![]() ColibriServoXL-Powerkabel 400VAC 6-adrigErfahren Sie mehr
ColibriServoXL-Powerkabel 400VAC 6-adrigErfahren Sie mehr6-adrig mit Ballastleitung
passend für alle ColibriServoXL-Motoren 400V
schleppkettentauglich,
konfektioniert mit geradem Stecker einseitig
6x1,0mm² Spezial - PVC
92,00 €Exkl. 19% Steuern109,48 €Inkl. 19% Steuernzzgl. Versandkosten -
![]() Colibri23 4.0 PowerkabelErfahren Sie mehr• 2-20 m
Colibri23 4.0 PowerkabelErfahren Sie mehr• 2-20 m
• A-kodiert
• Buchse gerade• 5-polig auf freies Leitungsende• 0,75mm²
• schleppkettentauglich• 0,75mm²
• Tauglich für Schleppketten32,00 €Exkl. 19% Steuern38,08 €Inkl. 19% Steuernzzgl. Versandkosten -
![]() ColibriServo-PowerkabelErfahren Sie mehr
ColibriServo-PowerkabelErfahren Sie mehrpassend für ColibriServo BG 6 u. 7
schleppkettentauglich,
konfektioniert mit geradem Stecker einseitig 6x0,5mm² PUR78,00 €Exkl. 19% Steuern92,82 €Inkl. 19% Steuernzzgl. Versandkosten -
![]()
 ColibriServo BG 5/2, 150WErfahren Sie mehr
ColibriServo BG 5/2, 150WErfahren Sie mehrServomotor mit integrierter Steuerung
Baugröße 5/2
Ansteuerung: Profinet, Profibus DP, CANopen, Ethercat, Digital I/O Positionierbetrieb
Leistung 150 W
Nennmoment: 0,5Nm
Nenndrehzahl: 3000 1/min
Motorversorgung 48 V DC
Steuerungsposition variabel1.417,00 €Exkl. 19% Steuern1.686,23 €Inkl. 19% Steuernzzgl. Versandkosten -
![]()
 ColibriServo BG7, 400W-600WErfahren Sie mehr
ColibriServo BG7, 400W-600WErfahren Sie mehrServomotor mit integrierter Steuerung
Baugröße 7/x
Ansteuerung: Profinet, Profibus DP, CANopen, Ethercat, Digital I/O Positionierbetrieb
Leistung 400W - 600W
Nenndrehzahl: 1600 1/min - 3750 1/min
Motorversorgung 24 –60 V DC1.356,30 €Exkl. 19% Steuern1.614,00 €Inkl. 19% Steuernzzgl. Versandkosten -
![]()
 ColibriServo BG 6, 120W-260WErfahren Sie mehr
ColibriServo BG 6, 120W-260WErfahren Sie mehrServomotor mit integrierter Steuerung
Baugröße 6/x
Ansteuerung: Profinet, Profibus DP, CANopen, Ethercat, Digital I/O Positionierbetrieb
Leistung 120W - 260W
Nenndrehzahl: 3000 1/min
Motorversorgung 24 –48 V DC880,00 €Exkl. 19% Steuern1.047,20 €Inkl. 19% Steuernzzgl. Versandkosten -
![]() ColibriServo-PowersteckerErfahren Sie mehr
ColibriServo-PowersteckerErfahren Sie mehrPowerstecker gerade ohne Kabel
26,00 €Exkl. 19% Steuern30,94 €Inkl. 19% Steuernzzgl. Versandkosten -
![]()
 ColibriServo-XL bis 3.2kWErfahren Sie mehr
ColibriServo-XL bis 3.2kWErfahren Sie mehrServomotor mit integrierter Steuerung
Baugröße XL
Ansteuerung: Profinet, Profibus DP, CANopen, Ethercat, Digital I/O Positionierbetrieb
Leistung 0,7kW-3,2kW
Nennmoment: 2-7Nm
Nenndrehzahl: 2000-6000 1/min
Motorversorgung 230VAC - 400VAC1.712,16 €Exkl. 19% Steuern2.037,47 €Inkl. 19% Steuernzzgl. Versandkosten -
![]() ColibriServo-ProgrammierkitErfahren Sie mehr
ColibriServo-ProgrammierkitErfahren Sie mehrProgrammierkit für ColibriServo
196,00 €Exkl. 19% Steuern233,24 €Inkl. 19% Steuernzzgl. Versandkosten -
![]() ColibriServo-SignalkabelErfahren Sie mehr
ColibriServo-SignalkabelErfahren Sie mehrpassend für alle Colibri-Servo-Motoren
schleppkettentauglich, konfektioniert mit
geradem Stecker einseitig 18x0,14mm² PURinkl. STO-Leitungen
113,00 €Exkl. 19% Steuern134,47 €Inkl. 19% Steuernzzgl. Versandkosten -
![]() ColibriServo-SignalsteckerErfahren Sie mehr
ColibriServo-SignalsteckerErfahren Sie mehrSignalstecker gerade ohne Kabel
32,00 €Exkl. 19% Steuern38,08 €Inkl. 19% Steuernzzgl. Versandkosten -
![]() Colibri17/23 AnschlusskabelErfahren Sie mehr
Colibri17/23 AnschlusskabelErfahren Sie mehr-
15-pol. Sub-D HD Buchse
-
konfektioniert mit geradem Stecker einseitig
-
schleppkettentauglich (2m-20m)
37,00 €Exkl. 19% Steuern44,03 €Inkl. 19% Steuernzzgl. Versandkosten -
-
![]() Colibri34 AnschlusskabelErfahren Sie mehr
Colibri34 AnschlusskabelErfahren Sie mehr16-pol. gerade Buchse M23
schleppkettentauglich
79,20 €Exkl. 19% Steuern94,25 €Inkl. 19% Steuernzzgl. Versandkosten -
![]() ColibriServoXL-Powerkabel 230VAC 5-adrigErfahren Sie mehr
ColibriServoXL-Powerkabel 230VAC 5-adrigErfahren Sie mehr5-adrig mit Ballastleitung
passend für alle ColibriServoXL-Motoren 230V
schleppkettentauglich,
konfektioniert mit geradem Stecker einseitig 5x1mm² PUR
91,35 €Exkl. 19% Steuern108,71 €Inkl. 19% Steuernzzgl. Versandkosten -
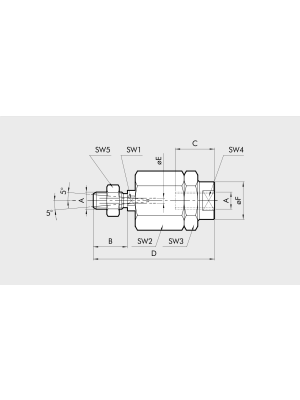
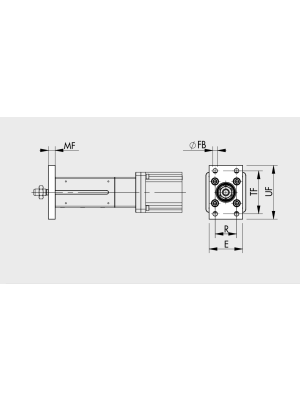
![]() Ausgleichskupplung Typ GA-KErfahren Sie mehrAusgleichskupplung als Zubehör für die Elektro Kompaktzylinder:
Ausgleichskupplung Typ GA-KErfahren Sie mehrAusgleichskupplung als Zubehör für die Elektro Kompaktzylinder:
• Colibri-L SSC23 • Colibri-LE32
• Colibri-LE50HD • Colibri-LE63HD ISO 1555244,77 €Exkl. 19% Steuern53,28 €Inkl. 19% Steuernzzgl. Versandkosten -
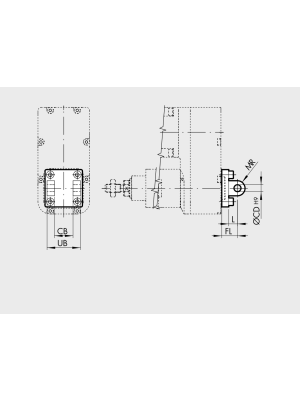
![]() Schwenkgabelbefestigung Typ B STAHLErfahren Sie mehrSchwenkgabelbefestigung aus Stahl als Zubehör für die Elektro Kompaktzylinder:
Schwenkgabelbefestigung Typ B STAHLErfahren Sie mehrSchwenkgabelbefestigung aus Stahl als Zubehör für die Elektro Kompaktzylinder:
• Colibri-L SSC23 • Colibri-LE32
• Colibri-LE50HD • Colibri-LE63HD ISO 1555238,15 €Exkl. 19% Steuern45,40 €Inkl. 19% Steuernzzgl. Versandkosten -
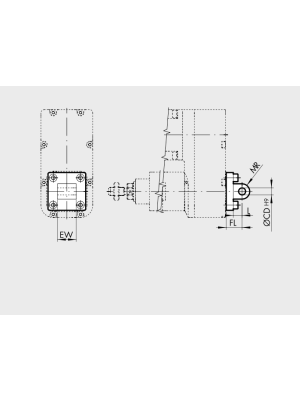
![]() Schwenkaugenbefestigung Typ BA STAHLErfahren Sie mehrSchwenkaugenbefestigung aus Stahl als Zubehör für die Elektro Kompaktzylinder:
Schwenkaugenbefestigung Typ BA STAHLErfahren Sie mehrSchwenkaugenbefestigung aus Stahl als Zubehör für die Elektro Kompaktzylinder:
• Colibri-L SSC23 • Colibri-LE32 • Colibri-LE23
• Colibri-LE50HD • Colibri-LE63HD ISO 1555243,44 €Exkl. 19% Steuern51,69 €Inkl. 19% Steuernzzgl. Versandkosten -
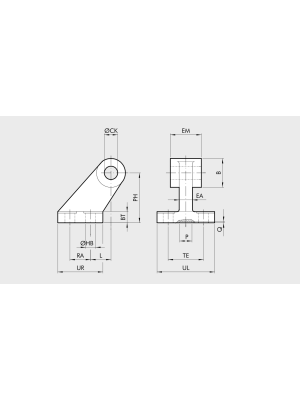
![]() ISO15552 - Gegenlager für Typ B - Typ AB7 STAHLErfahren Sie mehrGegenlager aus Stahl als Zubehör für die Elektro Kompaktzylinder:
ISO15552 - Gegenlager für Typ B - Typ AB7 STAHLErfahren Sie mehrGegenlager aus Stahl als Zubehör für die Elektro Kompaktzylinder:
• Colibri-L SSC23 • Colibri-LE32
• Colibri-LE50HD • Colibri-LE63HD ISO 1555245,24 €Exkl. 19% Steuern53,84 €Inkl. 19% Steuernzzgl. Versandkosten -
![]() MagnetschalterErfahren Sie mehrMagnetschalter für Profilbefestigung PNP als Zubehör für die Elektro Kompaktzylinder:
MagnetschalterErfahren Sie mehrMagnetschalter für Profilbefestigung PNP als Zubehör für die Elektro Kompaktzylinder:
• Colibri-L SSC23 • Colibri-LE32
• Colibri-LE50HD • Colibri-LE63HD ISO 1555228,59 €Exkl. 19% Steuern34,02 €Inkl. 19% Steuernzzgl. Versandkosten -
![]() Schaltnetzteil 24VDCErfahren Sie mehr
Schaltnetzteil 24VDCErfahren Sie mehrSchaltnetzteil Hutschiene
Ausgangsspannung: 24VDC
Ausgangsstrom: bis 10A40,00 €Exkl. 19% Steuern47,60 €Inkl. 19% Steuernzzgl. Versandkosten -
![]() Näherungsschalter INS-S-8x8-K2mErfahren Sie mehr
Näherungsschalter INS-S-8x8-K2mErfahren Sie mehrNäherungsschalter für Colibri-L Motorpositioniertische
57,00 €Exkl. 19% Steuern67,83 €Inkl. 19% Steuernzzgl. Versandkosten -
![]() Deckelflansch Typ CErfahren Sie mehrDeckelflansch als Zubehör für die Elektro Kompaktzylinder:• Colibri-L SSC23 • Colibri-LE32• Colibri-LE50HD • Colibri-LE63HD ISO 1555212,81 €Exkl. 19% Steuern15,24 €Inkl. 19% Steuernzzgl. Versandkosten
Deckelflansch Typ CErfahren Sie mehrDeckelflansch als Zubehör für die Elektro Kompaktzylinder:• Colibri-L SSC23 • Colibri-LE32• Colibri-LE50HD • Colibri-LE63HD ISO 1555212,81 €Exkl. 19% Steuern15,24 €Inkl. 19% Steuernzzgl. Versandkosten -
![]() Kolbenstangenmutter Typ SErfahren Sie mehrKolbenstangenmutter als Zubehör für die Elektro Kompaktzylinder:• Colibri-L SSC23 • Colibri-LE32• Colibri-LE50HD • Colibri-LE63HD ISO 15552 • Colibri-LE231,65 €Exkl. 19% Steuern1,96 €Inkl. 19% Steuernzzgl. Versandkosten
Kolbenstangenmutter Typ SErfahren Sie mehrKolbenstangenmutter als Zubehör für die Elektro Kompaktzylinder:• Colibri-L SSC23 • Colibri-LE32• Colibri-LE50HD • Colibri-LE63HD ISO 15552 • Colibri-LE231,65 €Exkl. 19% Steuern1,96 €Inkl. 19% Steuernzzgl. Versandkosten -
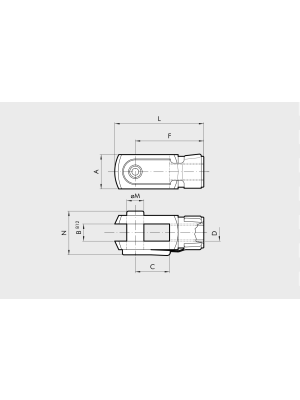
![]() Gabelkopf Typ GK-MErfahren Sie mehrGabelkopf als Zubehör für die Elektro Kompaktzylinder:• Colibri-L SSC23 • Colibri-LE32• Colibri-LE50HD • Colibri-LE63HD ISO 15552 • Colibri-LE234,85 €Exkl. 19% Steuern5,77 €Inkl. 19% Steuernzzgl. Versandkosten
Gabelkopf Typ GK-MErfahren Sie mehrGabelkopf als Zubehör für die Elektro Kompaktzylinder:• Colibri-L SSC23 • Colibri-LE32• Colibri-LE50HD • Colibri-LE63HD ISO 15552 • Colibri-LE234,85 €Exkl. 19% Steuern5,77 €Inkl. 19% Steuernzzgl. Versandkosten -
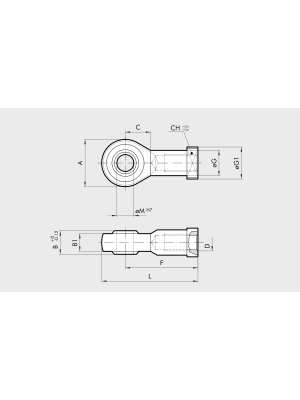
![]() Gelenkauge Typ GA-MErfahren Sie mehrKolbenstangenmutter als Zubehör für die Elektro Kompaktzylinder:• Colibri-L SSC23 • Colibri-LE32• Colibri-LE50HD • Colibri-LE63HD ISO 1555226,69 €Exkl. 19% Steuern31,76 €Inkl. 19% Steuernzzgl. Versandkosten
Gelenkauge Typ GA-MErfahren Sie mehrKolbenstangenmutter als Zubehör für die Elektro Kompaktzylinder:• Colibri-L SSC23 • Colibri-LE32• Colibri-LE50HD • Colibri-LE63HD ISO 1555226,69 €Exkl. 19% Steuern31,76 €Inkl. 19% Steuernzzgl. Versandkosten -
![]() MPT17 5008 50mm Hub MotorpositioniertischErfahren Sie mehr
MPT17 5008 50mm Hub MotorpositioniertischErfahren Sie mehrColibri-L MPT17 5008
Motorpositioniertisch mit Colibri-Kompaktantrieb
Axialspiel: < 0,04mm
Radialspiel der Gleitführungen: < 0,02mm
Spindelsteigung: 2mm
max. Eingangsdrehzahl: 600 U/min
Hub: 50mm929,00 €Exkl. 19% Steuern1.105,51 €Inkl. 19% Steuernzzgl. Versandkosten -
![]() MPT17 7512 75mm Hub MotorpositioniertischErfahren Sie mehr
MPT17 7512 75mm Hub MotorpositioniertischErfahren Sie mehrColibri-L MPT17 7512
Motorpositioniertisch mit Colibri-Kompaktantrieb
Axialspiel: < 0,04mm
Radialspiel der Gleitführungen: < 0,02mm
Spindelsteigung: 2mm
max. Eingangsdrehzahl: 600 U/min
Hub: 75mm934,00 €Exkl. 19% Steuern1.111,46 €Inkl. 19% Steuernzzgl. Versandkosten -
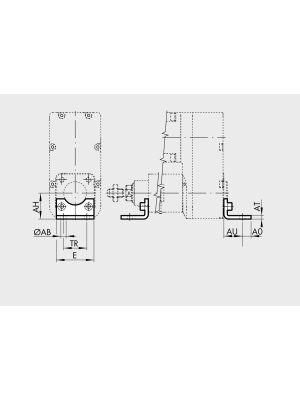
![]() Fussbefestigung Typ AErfahren Sie mehrFussbefestigung als Zubehör für die Elektro Kompaktzylinder:• Colibri-L SSC23 • Colibri-LE32• Colibri-LE50HD • Colibri-LE63HD ISO 155527,42 €Exkl. 19% Steuern8,83 €Inkl. 19% Steuernzzgl. Versandkosten
Fussbefestigung Typ AErfahren Sie mehrFussbefestigung als Zubehör für die Elektro Kompaktzylinder:• Colibri-L SSC23 • Colibri-LE32• Colibri-LE50HD • Colibri-LE63HD ISO 155527,42 €Exkl. 19% Steuern8,83 €Inkl. 19% Steuernzzgl. Versandkosten -
![]() Sphärische Schwenkaugenbefestigung Typ BASErfahren Sie mehrSphärische Schwenkaugenbefestigung als Zubehör für die Elektro Kompaktzylinder:
Sphärische Schwenkaugenbefestigung Typ BASErfahren Sie mehrSphärische Schwenkaugenbefestigung als Zubehör für die Elektro Kompaktzylinder:
• Colibri-L SSC23 • Colibri-LE32 • Colibri-LE23
• Colibri-LE50HD • Colibri-LE63HD ISO 15552
58,27 €Exkl. 19% Steuern69,34 €Inkl. 19% Steuernzzgl. Versandkosten -
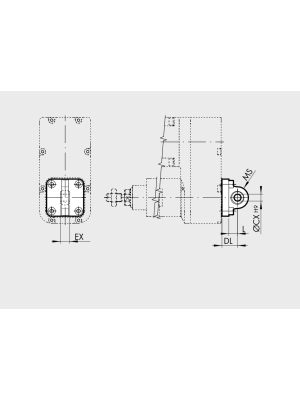
![]() MDT23 QN 360110 ohne MotorErfahren Sie mehr
MDT23 QN 360110 ohne MotorErfahren Sie mehrMDT23 QN 360110 Motordrehtisch ohne Motor
Flansch und Kupplung für Nema 23 Schrittmotor (6.35mm Welle)
Getriebeübersetzung: 2:1
Wirkungsgrad: 0,85
Umkehrspiel: < 0,2°
Planlauf der Drehscheibe:< 0,02 mm
Rundlauf der Drehscheibe: < 0,02mm
Benötigtes Eingangsdrehmoment: 0,12 Nm für Leerlauf
zul. Ausgangsdrehmoment M1: 10 Nm abhängig vom Motor
zul. Kippmoment M2: 100 Nm
max Eingangsdrehzahl: 600 U/min1.895,00 €Exkl. 19% Steuern2.255,05 €Inkl. 19% Steuernzzgl. Versandkosten -
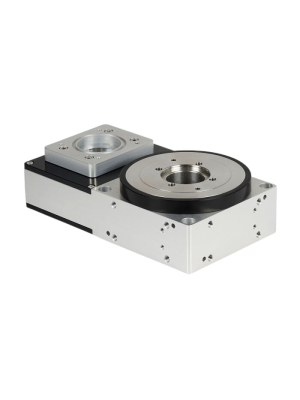
![]() MDT17 36008 MotordrehtischErfahren Sie mehr
MDT17 36008 MotordrehtischErfahren Sie mehrColibri-MDT 17 36008 Motordrehtisch
Getriebeübersetzung: 40:1
Umkehrspiel: < 0,12°
Radialspiel: < 0,02mm
Planlauf der Drehscheibe: < 0,03mm
zul. Ausgangsdrehmoment M1: 1,2Nm
zul. Kippmoment M2: 1,8N
max Eingangsdrehzahl: 600 U/min1.421,41 €Exkl. 19% Steuern1.691,48 €Inkl. 19% Steuernzzgl. Versandkosten -
![]() MDT17 36012 MotordrehtischErfahren Sie mehr
MDT17 36012 MotordrehtischErfahren Sie mehrColibri-MDT 17 36012 Motordrehtisch
Getriebeübersetzung: 55:1Umkehrspiel: < 0,1°Radialspiel: < 0,02mmPlanlauf der Drehscheibe: < 0,03mmzul. Ausgangsdrehmoment M1: 3Nm
zul. Kippmoment M2: 3Nmmax Eingangsdrehzahl: 600 U/min1.440,32 €Exkl. 19% Steuern1.713,98 €Inkl. 19% Steuernzzgl. Versandkosten -
![]() BAC-CFG Konfigurationssoftware für I/O-GeräteErfahren Sie mehr
BAC-CFG Konfigurationssoftware für I/O-GeräteErfahren Sie mehrColibri BAC Konfigsoftware
Diese Software ist nur für die Konfiguration von den BAC-Steuerungen verwendbar.
- Erstellung Fahrprogramm
- Einstellen der Fahrparameter
Die Kommunikation erfolgt über den USB am PC, hierzu ist ein Schnittstellenkabel mit Pegeladapter notwendig.
Achtung: Diese Software ist nicht für die Konfiguration von BUS-Geräten wie Profinet, Profibus, CANopen verwendbar.
0,00 €Exkl. 19% Steuern0,00 €Inkl. 19% Steuernzzgl. Versandkosten -
![]() MDT17 36012-HPErfahren Sie mehr
MDT17 36012-HPErfahren Sie mehrColibri-L MDT17 36012-HP i=10 o. i=45
inkl. Motor und Positioniersteuerung BAC
Getriebeübersetzung: 10:1 o.45:1
Wirkungsgrad η: 0,69
Umkehrspiel: < 0,2°
Radialspiel: < 0,02mm
Planlauf der Drehscheibe: < 0,03mm
zul. Ausgangsdrehmoment M1: 3Nm
zul. Kippmoment M2: 3Nm
max Eingangsdrehzahl: 600 U/min1.722,00 €Exkl. 19% Steuern2.049,18 €Inkl. 19% Steuernzzgl. Versandkosten -
![]() MPT17 2408 24mm Hub MotorpositioniertischErfahren Sie mehr
MPT17 2408 24mm Hub MotorpositioniertischErfahren Sie mehrColibri-L MPT17 2408
Motorpositioniertisch mit Colibri-Kompaktantrieb
Axialspiel: < 0,04mm
Radialspiel der Gleitführungen: < 0,02mm
Spindelsteigung: 2mm
max. Eingangsdrehzahl: 600 U/min
Hub: 24mm902,00 €Exkl. 19% Steuern1.073,38 €Inkl. 19% Steuernzzgl. Versandkosten -
![]() MPT17 3012 30mm Hub MotorpositioniertischErfahren Sie mehr
MPT17 3012 30mm Hub MotorpositioniertischErfahren Sie mehrColibri-L MPT17 3012
Motorpositioniertisch mit Colibri-Kompaktantrieb
Axialspiel: < 0,04mm
Radialspiel der Gleitführungen: < 0,02mm
Spindelsteigung: 2mm
max. Eingangsdrehzahl: 600 U/min
Hub: 30mm932,00 €Exkl. 19% Steuern1.109,08 €Inkl. 19% Steuernzzgl. Versandkosten